
Make sure the following warnings have been read and fully understood before using adaptive cruise control or any of its features. Failure to use adaptive cruise control or any of its features safely could result in an accident, leading to serious injury or death.
Adaptive cruise control is not a substitute for driving safely, with due care and attention. Staying alert, driving safely, and being in control of the vehicle at all times is the responsibility of the driver.
Adaptive cruise control may not function properly under all weather and road conditions. Do not use adaptive cruise control in poor visibility, specifically fog, heavy rain, spray, or snow. Using adaptive cruise control in these conditions increases the risk of a loss of control of the vehicle.
Adaptive cruise control does not react to pedestrians or objects in the roadway. Additionally, adaptive cruise control may not react to stationary or slow-moving vehicles traveling below 6 mph (10 km/h), or oncoming vehicles in the same lane.
Adaptive cruise control uses a radar sensor to monitor the area in front of the vehicle. The radar sensor is mounted on the front of the vehicle. Keep this area of the vehicle clean and free from obstructions, e.g., stickers, debris, mud, snow, or ice. Failure to keep this area of the vehicle clean and free from obstructions may result in the system failing to identify objects ahead.
The driver should remain alert and intervene, if necessary, when adaptive cruise control is in operation.
The adaptive cruise control system may operate unexpectedly in certain conditions. For example:
When driving on a different line to the vehicle in front.

When a vehicle edges into the same lane as the vehicle being driven. The vehicle is only detected once it has moved fully into the same lane.
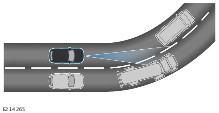
When entering or exiting a bend. Vehicles in front may not be detected.

When moving around a stationary vehicle. The detection beam may become uncertain as to which vehicle should be followed.
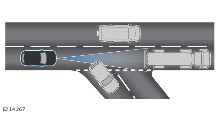
When the vehicle in front turns out of the same lane as the vehicle being driven. The detection beam may become uncertain as to which vehicle should be followed.